Install dependencies
Install the Driver
# Agree to restart after installation
wget -O install_pivariety_pkgs.sh https://github.com/ArduCAM/Arducam-Pivariety-V4L2-Driver/releases/download/install_script/install_pivariety_pkgs.sh
chmod +x install_pivariety_pkgs.sh
./install_pivariety_pkgs.sh -p 64mp_pi_hawk_eye_kernel_driver
libcamera-dev and libcamera-apps Installation
./install_pivariety_pkgs.sh -p libcamera_dev
./install_pivariety_pkgs.sh -p libcamera_apps
Configuration
if you are under pi4:
Open /boot/config.txt, under [pi4], add the following line:
dtoverlay=vc4-kms-v3d,cma-512
Example:
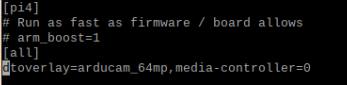
[pi4]
arm_boost=1
dtoverlay=vc4-kms-v3d,cma-512
if you are under pi0-3 and other pi models:
Open /boot/config.txt, under [all], add the following line:
dtoverlay=vc4-kms-v3d,cma-512
Example:
[all]
arm_boost=1
dtoverlay=vc4-kms-v3d,cma-512
under pi0-3,you also need to open some configuration:
- Open a terminal
- Run sudo raspi-config
- Navigate to Advanced Options
- Enable Glamor graphic acceleration
- Go back to Advanced Options
- Navigate to GL Driver
- Select GL (Full KMS)
- Reboot your Pi
Test
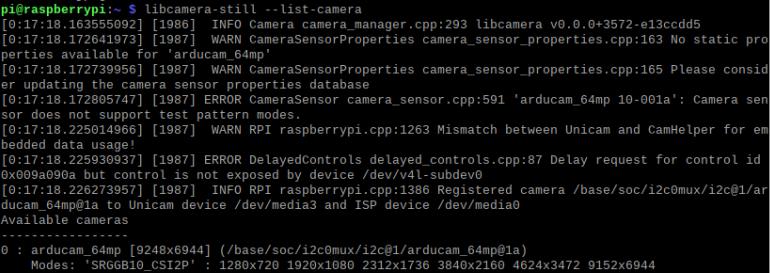
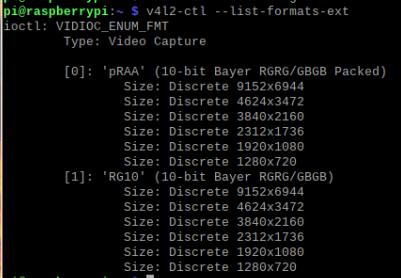
Check video device:
Run the libcamera example to see if the image can be capture normally.
For the latest usage method, please refer to our official documents:
https://docs.arducam.com/Raspberry-Pi-Camera/Native-camera/Libcamera-User-Guide/#for-arducam-16mp64mp-autofocus-camera
We recommend using the latest version of libcamera, if it is unavailable or effective for usage, please contact me in time.
##### Pi4:
libcamera-still -t 5000 --viewfinder-width 2312 --viewfinder-height 1736 -o 64mp.jpg
##### Other Pi models:
If you are using 64MP camera with older Pi models, pls set the resolution to 16MP (superpixel mode):
–width 4624 --height 3472
libcamera-still -t 5000 --viewfinder-width 2312 --viewfinder-height 1736 --width 4624--height 3472 -o 64mp.jpg
### AutoFocus
Pi 4:
libcamera-still -t 5000 --viewfinder-width 2312 --viewfinder-height 1736 -o pi_hawk_eye.jpg --autofocus
##### Other Pi models:
If you are using 64MP camera with older Pi models, pls set the resolution to 16MP (superpixel mode):
–width 4624 --height 3472
libcamera-still -t 5000 --viewfinder-width 2312 --viewfinder-height 1736 --width 4624--height 3472 -o 64mp.jpg --autofocus
Manual focus
Download the source code
git clone https://github.com/ArduCAM/Arducam-Pivariety-V4L2-Driver.git
Focus Control/Adjustment
# Press the Up/Down Arrow for focus adjustment, press “ctrl + c” to save, or “r” to reset
cd Arducam-Pivariety-V4L2-Driver/focus
python3 FocuserExample.py -d /dev/v4l-subdev1
Step Adjustments
While you are trying manual focus control, you can use --focus-step [number] to configure how many
steps the motor in the lens should move when the Up/Down key is pressed.
By default, it’s set to 50, and you can change it to any value between 1 ~ 1023
python3 FocuserExample.py -d /dev/v4l-subdev1 --focus-step 10