1.Which seller did you purchase the product(s) from?
Other Arducam Distributor (Tokopedia)
2.The Model number of the product(s) you have purchased?
IMX219 8MP For Raspberry Pi
3.Which Platform are you using the product(s) on?
Raspberry Pi 4B
4.Which instruction are you following?
https://www.arducam.com/docs/cameras-for-raspberry-pi/synchronized-stereo-camera-hat/opencv-and-depth-map-on-arducam-stereo-camera-hat-tutorial/#video-tutorial
5.Has your product ever worked properly?
work intermittently
6.What problems are you experiencing?
dear @wong or anyone else, i already solved the calibration problem, but the finalized data for the calibration is upside-down unlike in the tutorial, is that true for look like this ? and for the python3 5_dm_tune.py also upside-down for the preview image and for the output python3 6_dm_video.py, was already fixed, and i got a bit of the depth mapping data but it’s not really accurate, it’s not same like the previous image at python3 5_dm_tune.py , so what should i do ? thank you
7.What attempts at troubleshooting have you already made?
ask a friend
8.How would you like us to help you?
show the solutions troubleshooting properly
for python3 5_dm_tune.py is upside-down like this 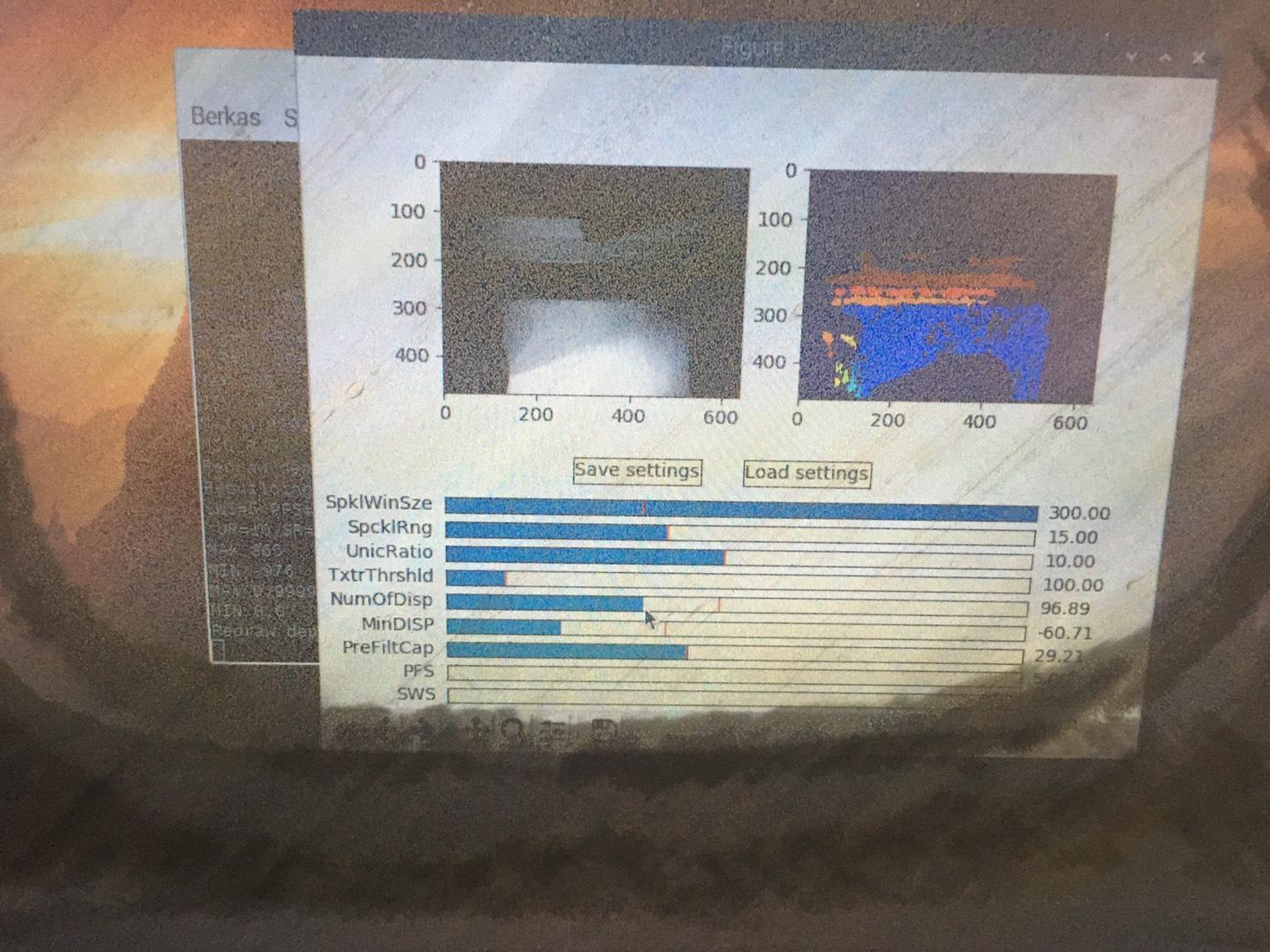
and for python3 6_dm_video.py is already fix but it’s not really accurate like the previous program 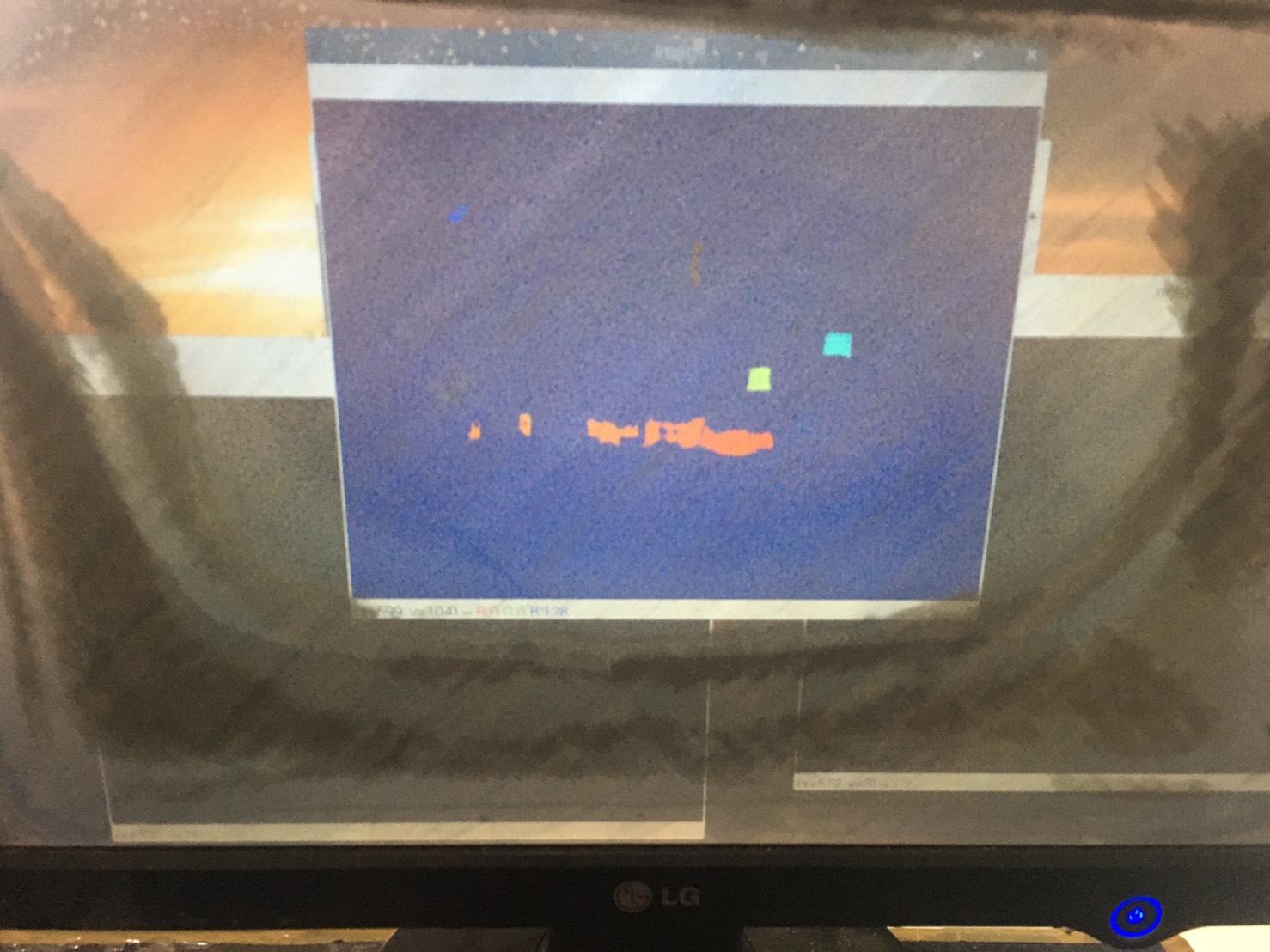
and for this step i don’t really understand, how should i do ? 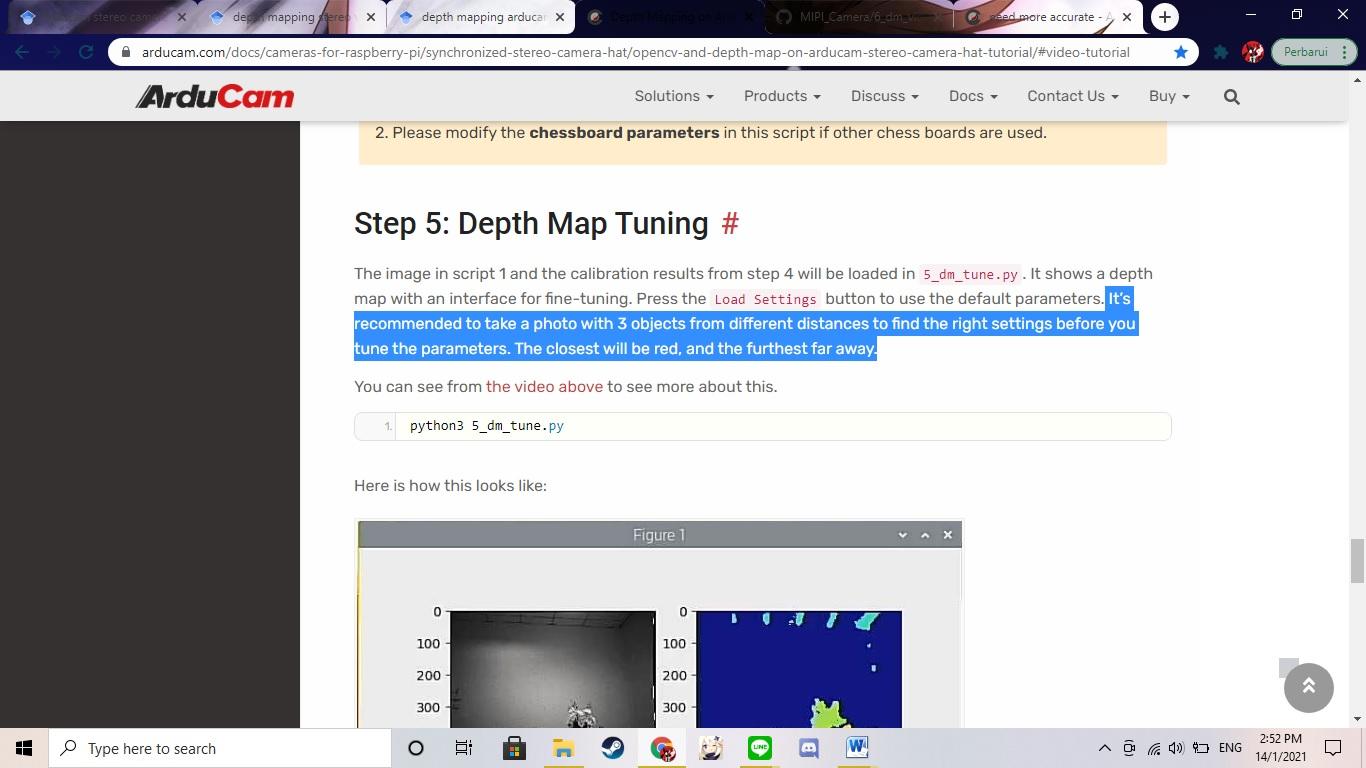
Hi @AldifaJulian ,
We are very sorry, but there have been some problems in our system recently, which caused us not to see your reply.
Not sure if your problem has been resolved, here is the response to the problem:
This problem seems to be the wrong order of the left and right images. Have you solved it?
Best Regards,