-
Where did you get the camera module(s)?
i don’t know exactly, because it is just school project -
Model number of the product(s)?
camera : IMX708(B0482) + multicam array (hat)
- What hardware/platform were you working on?
platform : Jetson orin nano
The compatibility of the jet pack version and L4T version with the IMX708 camera has been confirmed for use.
- Instructions you have followed. (link/manual/etc.)
https://docs.arducam.com/Nvidia-Jetson-Camera/Native-Camera/Quick-Start-Guide/
- Problems you were having?
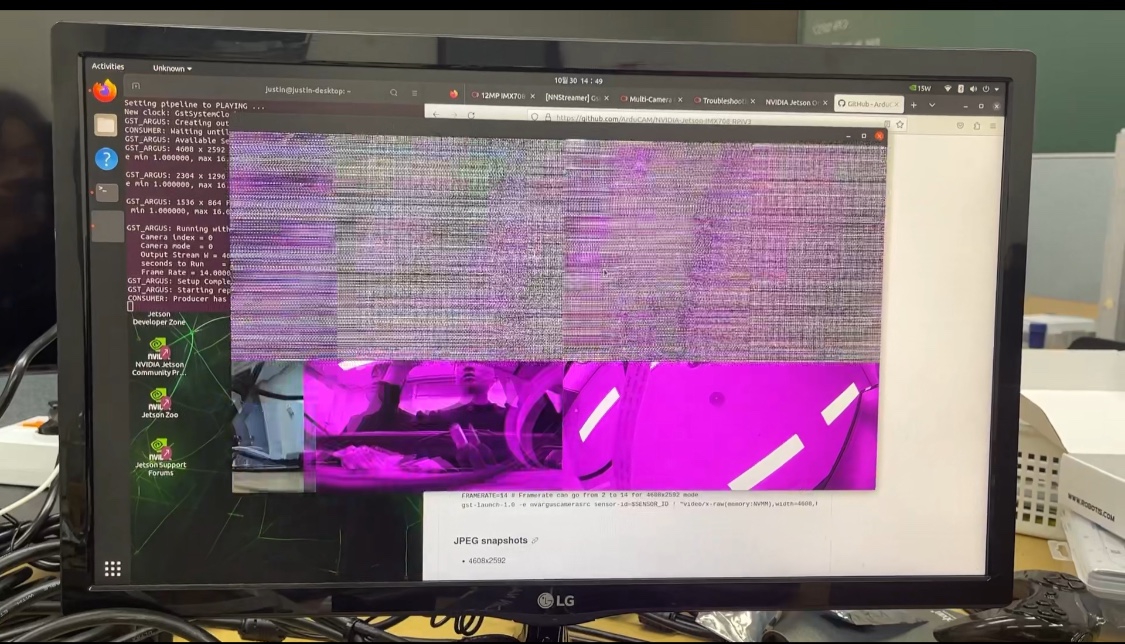
When using a single camera, there are no issues, and it works fine. However, when attempting to stream through a pipeline with four cameras using the HAT, there is a problem with the display sync not aligning correctly.
Is it possible that the camera HAT does not support the IMX708?
-
The dmesg log from your hardware?
-
Troubleshooting attempts you’ve made?
I suspected that the Gstreamer sync might be misconfigured. I tried using the following pipeline configurations at the top of the example pipeline: “! queue ! nvegltransform ! nveglglessink,” “! queue ! nv3dsink,” or “! queue ! appsink,” but none of them resolved the sync issue.
Additionally, when adjusting the capture size or reducing the frame rate, there should be an improvement in at least the frames per second (fps). However, when using the full scale, the image displays properly, but when lowering these settings, the cameras don’t activate at all.
I have already completed the driver installation, and I have previously worked with the IMX519 in a quad-camera setup, following the manual to easily install the driver. I also checked Git repositories that claim to support the IMX708, but the issue persists.
- What help do you need?
I’d like to resolve the issue of the display breaking when using the IMX708 with a multicam array to operate four cameras.