-
Where did you get the camera module(s)?
Uctronics -
Model number of the product(s)?
UC-512 rev C
2x UC-599 rev B -
What hardware/platform were you working on?
Jetson nano 4Gb, L4t 32.7.2 -
Instructions you have followed. (link/manual/etc.)
Install_full.sh -m arducam -
Problems you were having?
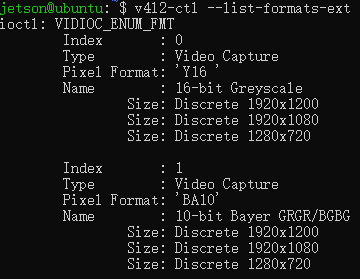
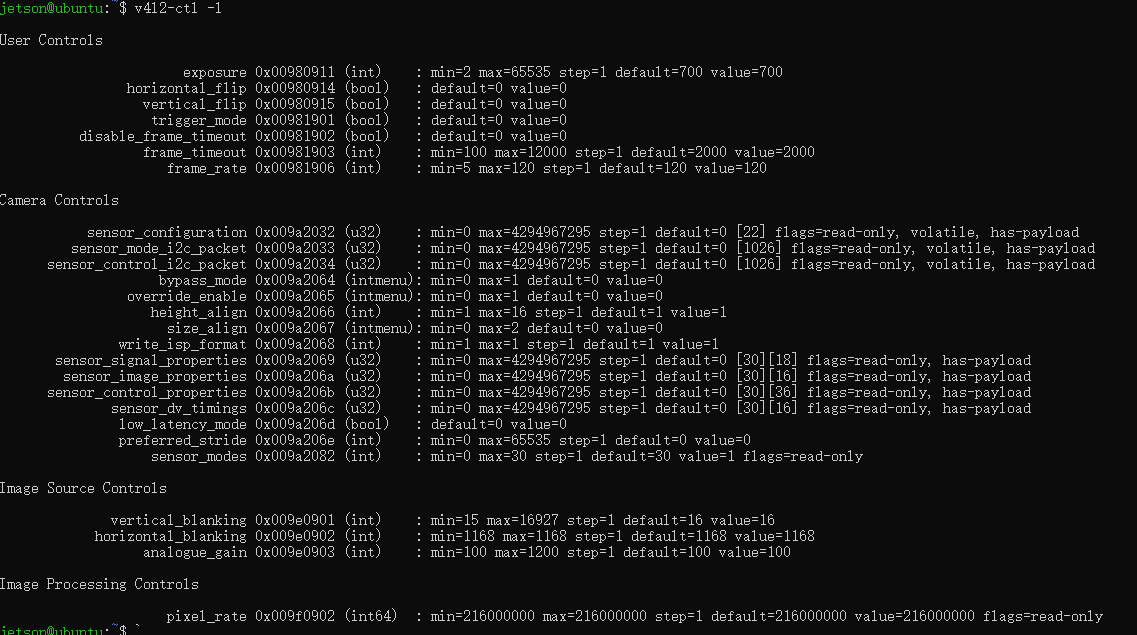
installation of driver seemed to go all right. I can get /dev/video0 as well. When running v4l2-ctl --list-formats-ext I get coherent output as well.
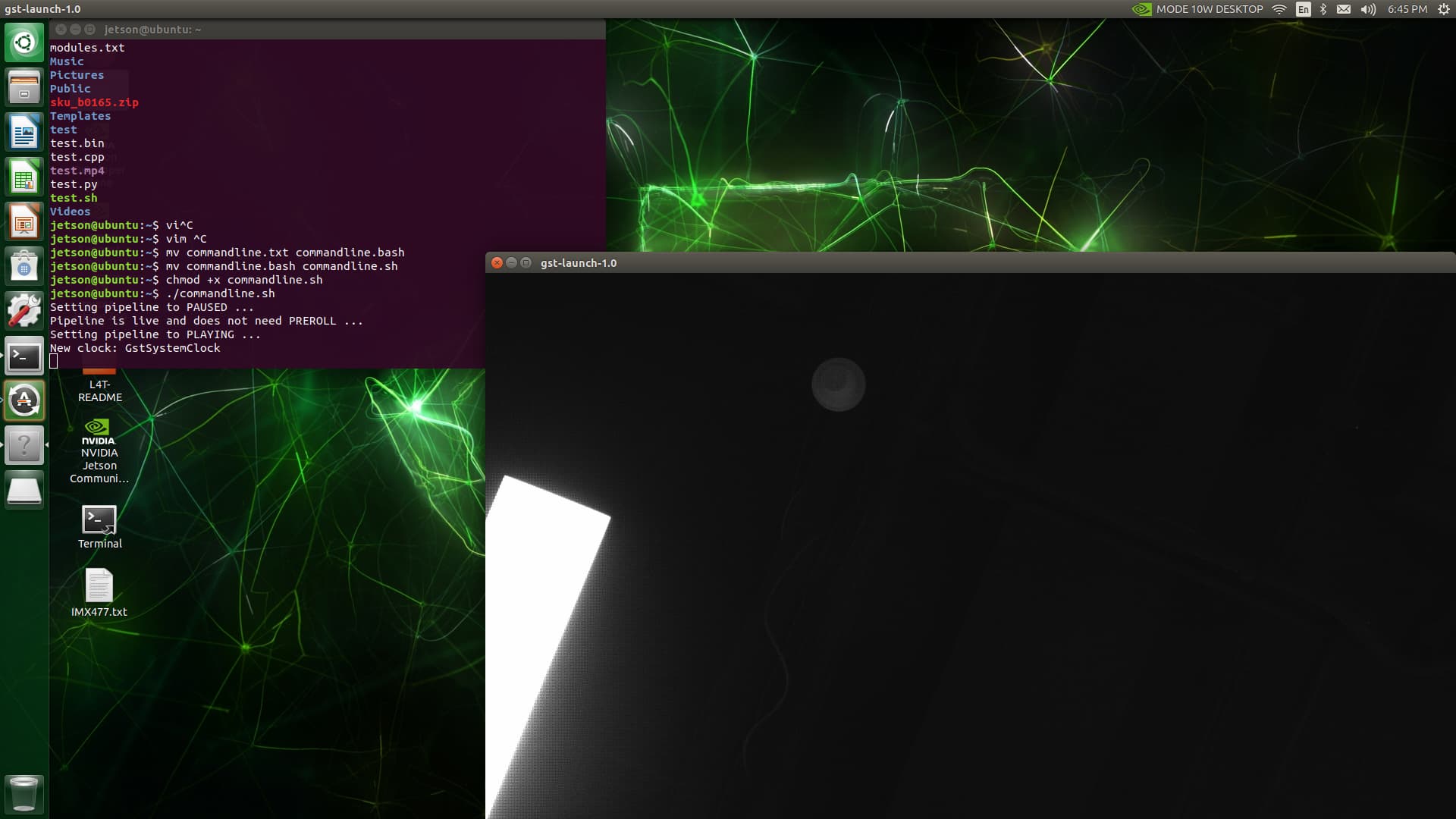
But, when running nvarguscamerasrc, I get:
Error generated. /dvs/git/dirty/git-master_linux/multimedia/nvgstreamer/gst-nvarguscamera/gstnvarguscamerasrc.cpp, execute:740 No cameras available
- The dmesg log from your hardware?
dmesg | grep -E “imx477|imx219|arducam”
[ 0.212373] DTS File Name: /var/jenkins_home/workspace/n_nano_kernel_l4t-32.7.1-arducam/kernel/kernel-4.9/arch/arm64/boot/dts/…/…/…/…/…/…/hardware/nvidia/platform/t210/porg/kernel-dts/tegra210-p3448-0000-p3449-0000-b00.dts
[ 0.420637] DTS File Name: /var/jenkins_home/workspace/n_nano_kernel_l4t-32.7.1-arducam/kernel/kernel-4.9/arch/arm64/boot/dts/…/…/…/…/…/…/hardware/nvidia/platform/t210/porg/kernel-dts/tegra210-p3448-0000-p3449-0000-b00.dts
[ 1.314532] arducam-csi2 7-000c: firmware version: 0x0003
[ 1.314888] arducam-csi2 7-000c: Sensor ID: 0x0000
[ 1.377781] arducam-csi2 7-000c: sensor arducam-csi2 7-000c registered
[ 1.402163] arducam-csi2: arducam_read: Reading register 0x103 failed
[ 1.402169] arducam-csi2 8-000c: probe failed
[ 1.402205] arducam-csi2 8-000c: Failed to setup board.
[ 1.550697] vi 54080000.vi: subdev arducam-csi2 7-000c bound
-
Troubleshooting attempts you’ve made?
Not much, I was just able to perform the suggested troubleshooting guides on your manuals, but non of them would give insight on this particular one -
What help do you need?
Please, help me debug this further, do you know where I could keep pulling this string? Thanks!