CvEng
January 20, 2023, 6:51pm
1
Hello. I’m using Arducam 1MP*2 Stereo Camera for Raspberry Pi Dual OV9281 from uctronics
I’ve followed the steps mentioned in the quick start guide and got the cameras working with libcamera-hello and libcamerastill --list cameras
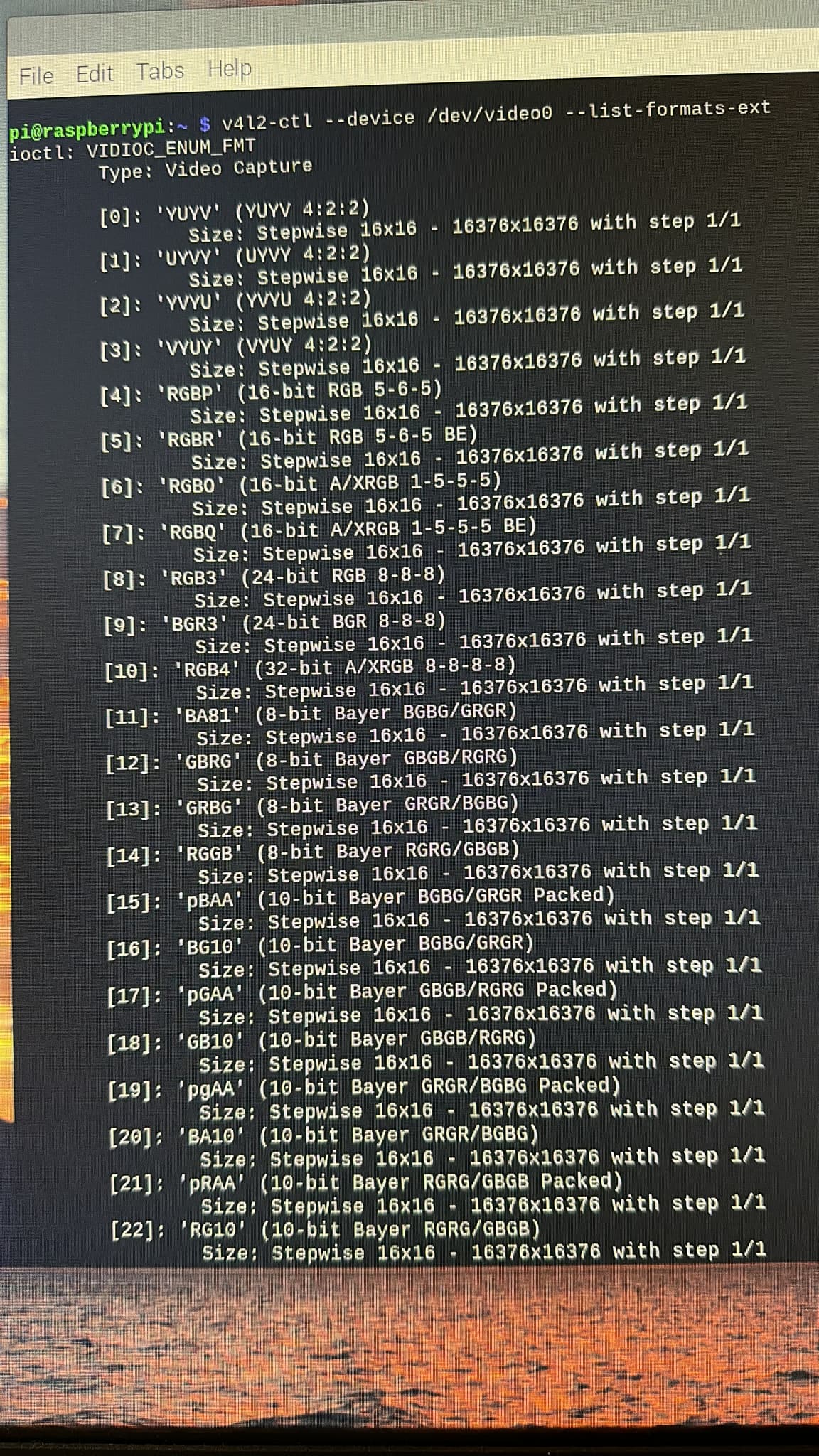
When I tried to do this v4l2-ctl --device /dev/video0 --list-formats-ext the output was different.
I want to use the camera with python and OpenCV so I was following this document OpenCV: Capture Frames from V4L2-Compliant Camera on Raspberry Pi (Python) - Arducam
Did anyone use Arducam 1MP*2 Stereo Camera for Raspberry Pi? If yes, are you able to read the stream using python/OpenCV libraries?
Thank you.
Dion
January 30, 2023, 3:41am
2
Hi,
cat /boot/config.txt
CvEng
February 12, 2023, 3:11am
3
Hello @Dion .
CvEng
February 13, 2023, 1:30am
4
Contents of camera_params.txt file
{
"device":0,
"height":600.0,
"scale":0.8,
"width":1600.0
}
Left and right image resolutions (480, 640), (480, 640)
Camera Matrix Left
[[ 457.89126587 0. 330.15019937]
[ 0. 547.35931396 224.28774596]
[ 0. 0. 1. ]]
Camera Matrix Right
[[ 452.39724731 0. 308.13979644]
[ 0. 540.30474854 243.61786565]
[ 0. 0. 1. ]]
Output of cv2.stereoCalibrate with cv2.CALIB_USE_INTRINSIC_GUESS
[[ 453.3113963 0. 333.24343816]
[ 0. 543.9532034 226.18159008]
[ 0. 0. 1. ]]
[[ 454.41436872 0. 311.79002161]
[ 0. 545.21297582 246.43618259]
[ 0. 0. 1. ]]
Translation Vector
[[-80.15960892]
[ 0.08208197]
[ 0.98773945]]
Rotation Matrix
[[ 9.99831715e-01 3.23562426e-04 1.83422144e-02]
[ -3.04563129e-04 9.99999414e-01 -1.03860751e-03]
[ -1.83425397e-02 1.03284637e-03 9.99831228e-01]]
Everything looks good except for the focal lengths in the camera matrix. The fx and fy values are off by 90 pixels. What might be the reason for this?
CvEng
February 14, 2023, 5:02pm
5
@Dion @wong any update on this?
Dion
February 16, 2023, 6:28am
6
Hi CvEng,