vsw
June 19, 2022, 8:00pm
1
Hi, i have 1mp stereo OV9281 board, Jetson NX, JP4.4, ROS Melodic.
roslaunch arducam_stereo_camera arducam_stereo_camera.launch
rosrun topic_tools throttle messages /arducam/left/image_raw 4.0 /left
rosrun topic_tools throttle messages /arducam/right/image_raw 4.0 /right
How to increase fps?
Best regards, Viktor.
vsw
June 21, 2022, 8:20am
2
Also it takes all cores with 100% usage for 2560x800 ~ 2mp MONO.
I tried
roslaunch arducam_stereo_camera arducam_stereo_camera.launch
only and set 40fps in launch file, but fps still too low.
May be Ros1 has bugs? Ros2 will faster?
lvbin
June 22, 2022, 8:28am
3
Hi,
vsw
June 22, 2022, 10:34am
4
Yes, tried displayer and there is 51fps and <20% cpu usage.
So where is the bottle neck?
vsw
June 22, 2022, 12:03pm
5
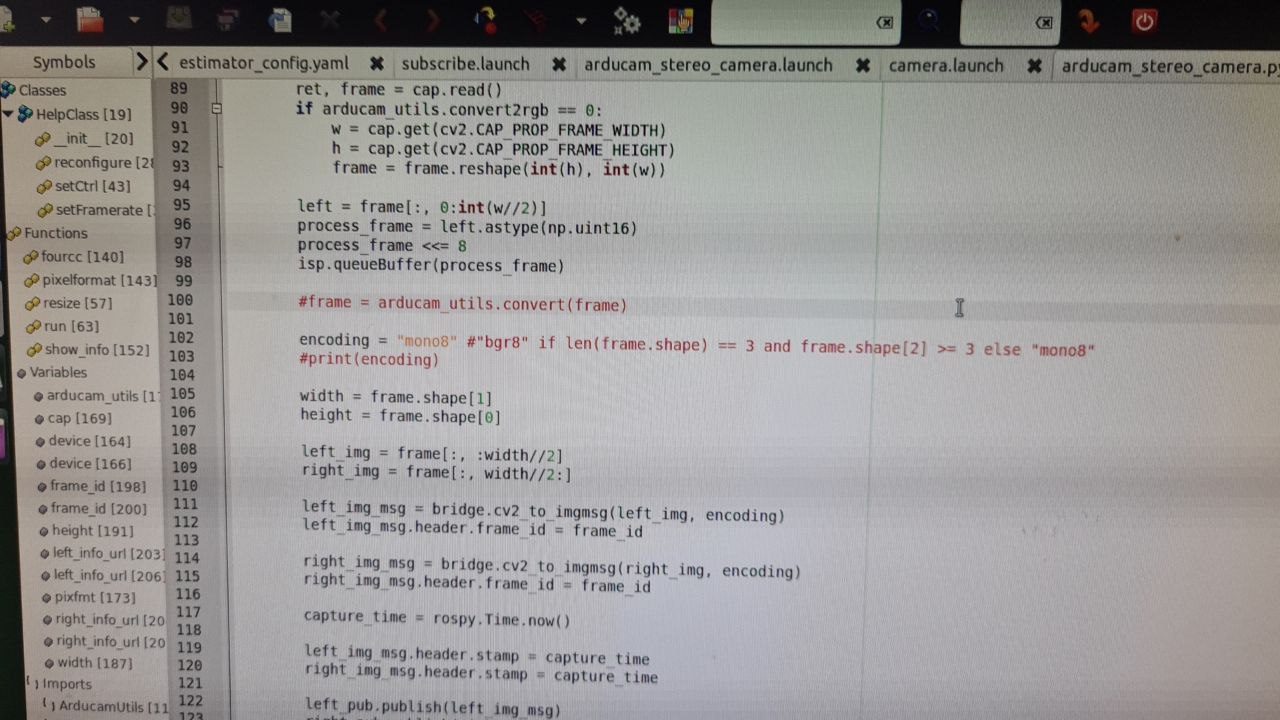
It seems arducam_stereo_camera.py bug.
I removed conversion and got 40fps and 50% usage.
Please confirm it.
lvbin
June 23, 2022, 8:32am
6
OK, got it. we will test it. In fact the color convert just use the openCV’s API.