- Where did you get the camera module(s)?
uctronics - Model number of the product(s).
B0388 - What hardware/platform were you working on?
pi cm4 with bullseye - Instructions you have followed. (link/manual/etc.)
Raspberry Pi libcamera Guide - Arducam - Problems you were having.
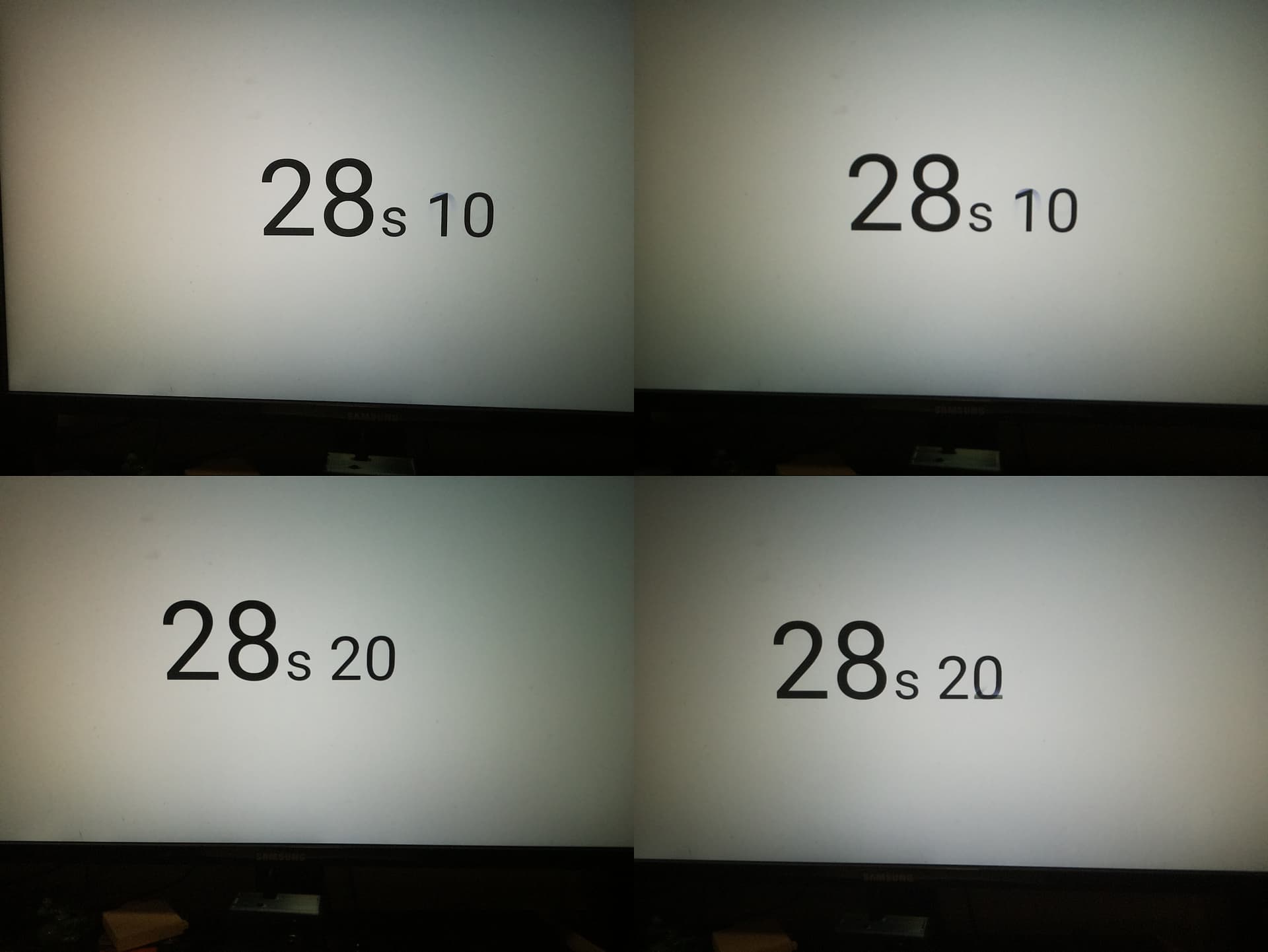
The bottom two cameras are desynced from the top two, there’s about a 100ms delay between the two. Is there any way to fix this?
Thanks!