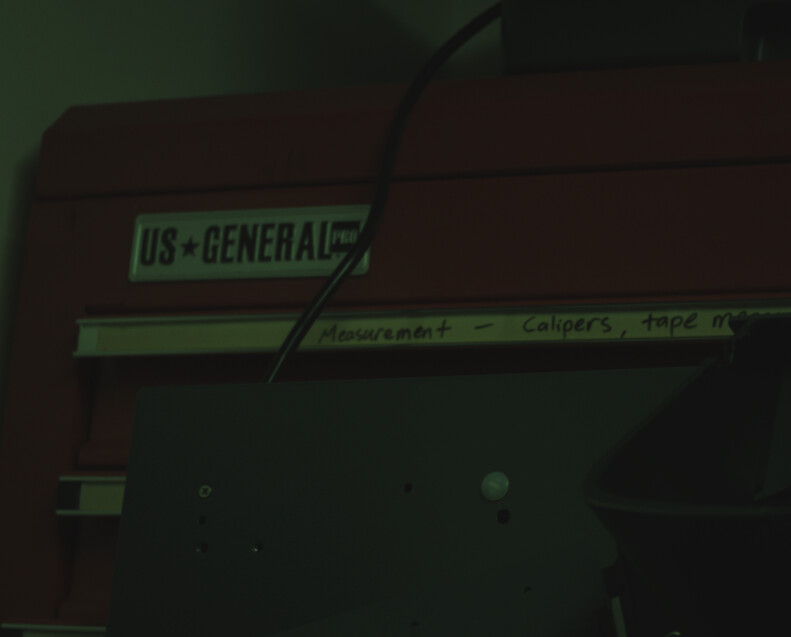
As shown in the image above, the camera is returning images with a green tint.
I get the image using the arducam_displayer.py script in MIPI_Camera/Jetson/Jetvariety/example at master · ArduCAM/MIPI_Camera · GitHub
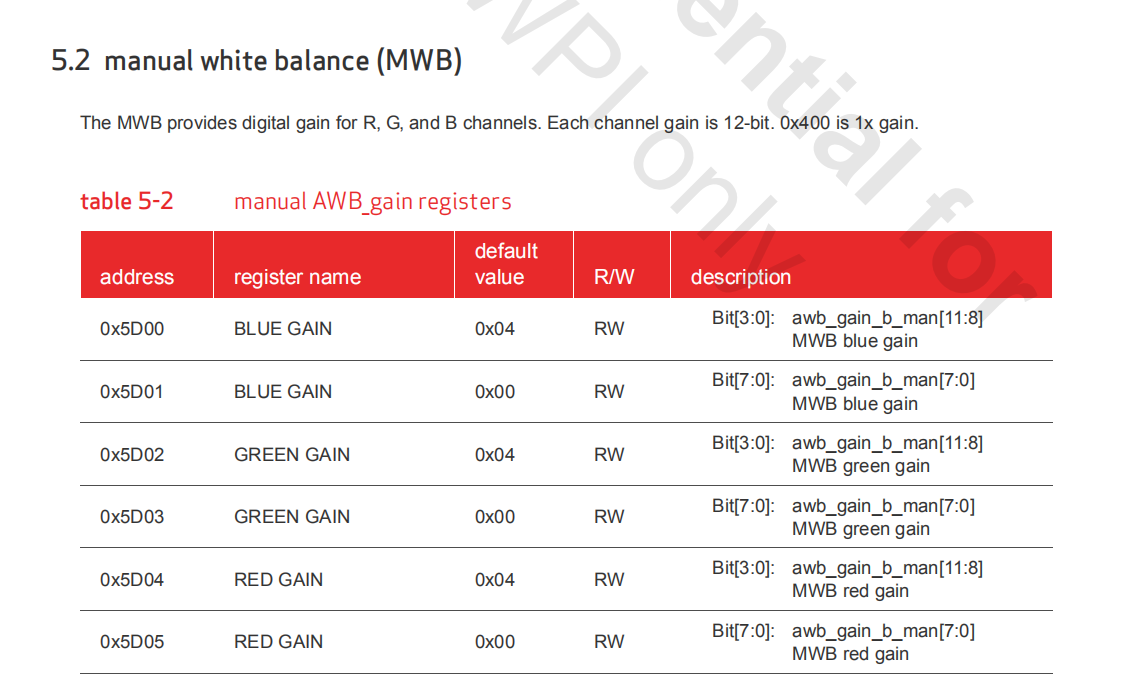
I believe the problem is due to auto-white balance – specifically, the green gain is too high, or the red/blue gain is too low. The script has a way to set the image sensor registers but I couldn’t find documentation anywhere describing what registers to set for AWB on the og02b10.
Here’s an Omnivision image sensor doc I found https://cdn.sparkfun.com/datasheets/Dev/RaspberryPi/ov5647_full.pdf. It’s not for the OG02B10 though - if I had something like this for the OG02B10 I think we could set the image sensor AWB registers.