Great camera. Much better than I expected.
I would like to know how the parameters in the following system call relate to the operation of the Motorized Focus Camera.
- os.system("i2cset -y 0 0x0c %d %d" % (dat1, dat2))
Great camera. Much better than I expected.
I would like to know how the parameters in the following system call relate to the operation of the Motorized Focus Camera.
Hi,
Thanks for your positive comment. In fact, we use a stepper driver chip to drive the focus motor
the driver chip open i2c interface and the timing is here:
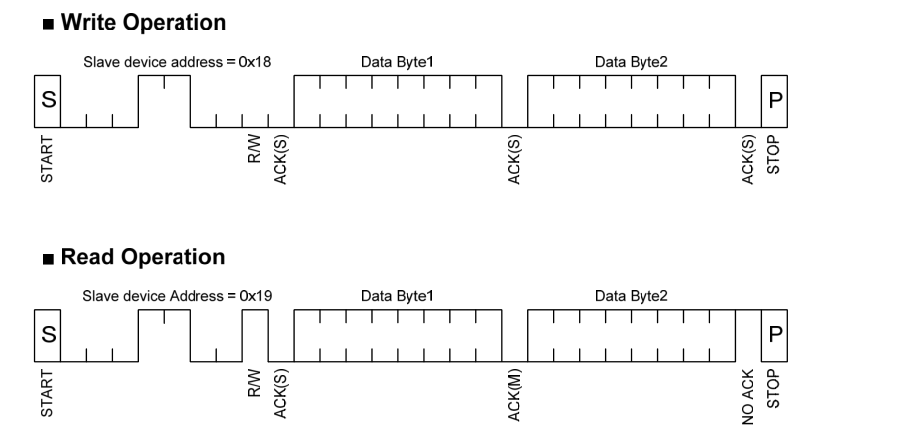
We will write two data to the register. You can refer to the below image I attached for you:

This helps. Thanks.
i2c and bitwise operators are new to me. So I’m learning a lot.
I’m building a 3D stereo camera (my 6th one). Focusing the camera modules has always been a problem. And I had to build separate cameras for normal and macro photography.
https://www.pinterest.com/3dheiser/3d-stereo-compact-camera/
My current camera uses a StereoPi board. I will be upgrading it to the 5mp Motorized Focus cameras soon. It should be good for objects as close as 2ft (limited by convergence distance).
These Motorized Focus modules will make my next camera possible. It will have a mechanically adjustable stereo baseline and convergence distance that ties into the i2c system call for focus. I’ll use the 8mp Motorized Focus modules.
This stereo pair was made using the 5mp Motorized Focus camera. Two separate shots stitched together.

Also, I’ve ordered an ArduCAM stereo camera HAT to play around with.
Hello,
Thanks for your positive comment, at present, our stereo camera board supports two identical sensors. and the two sensor can focus at the same time because of their sharing i2c bus.