Hello guys!
I’m having the following problem and I hope you have any clue about what’s happening. The device I have is an Arducam 16Mpx (IMX519) from Kickstarter campaign, using a Raspberry PI3B.
First of all, these are my outputs:
uname -a
Linux krvkweather 5.15.61-v7+ #1579 SMP Fri Aug 26 11:10:59 BST 2022 armv7l GNU/Linux
cat /etc/os-release
PRETTY_NAME="Raspbian GNU/Linux 11 (bullseye)"
NAME="Raspbian GNU/Linux"
VERSION_ID="11"
VERSION="11 (bullseye)"
VERSION_CODENAME=bullseye
ID=raspbian
ID_LIKE=debian
HOME_URL="http://www.raspbian.org/"
SUPPORT_URL="http://www.raspbian.org/RaspbianForums"
BUG_REPORT_URL="http://www.raspbian.org/RaspbianBugs"
cat /proc/meminfo
MemTotal: 944268 kB
MemFree: 685824 kB
MemAvailable: 806184 kB
Buffers: 35536 kB
Cached: 123500 kB
SwapCached: 0 kB
Active: 95192 kB
Inactive: 112092 kB
Active(anon): 756 kB
Inactive(anon): 48540 kB
Active(file): 94436 kB
Inactive(file): 63552 kB
Unevictable: 16 kB
Mlocked: 16 kB
SwapTotal: 102396 kB
SwapFree: 102396 kB
Dirty: 52 kB
Writeback: 0 kB
AnonPages: 48308 kB
Mapped: 41804 kB
Shmem: 1024 kB
KReclaimable: 14856 kB
Slab: 30452 kB
SReclaimable: 14856 kB
SUnreclaim: 15596 kB
KernelStack: 1168 kB
PageTables: 1440 kB
NFS_Unstable: 0 kB
Bounce: 0 kB
WritebackTmp: 0 kB
CommitLimit: 574528 kB
Committed_AS: 280188 kB
VmallocTotal: 1114112 kB
VmallocUsed: 5812 kB
VmallocChunk: 0 kB
Percpu: 400 kB
CmaTotal: 262144 kB
CmaFree: 258264 kB
cat /boot/config.txt
# For more options and information see
# http://rpf.io/configtxt
# Some settings may impact device functionality. See link above for details
# uncomment if you get no picture on HDMI for a default "safe" mode
#hdmi_safe=1
# uncomment the following to adjust overscan. Use positive numbers if console
# goes off screen, and negative if there is too much border
#overscan_left=16
#overscan_right=16
#overscan_top=16
#overscan_bottom=16
# uncomment to force a console size. By default it will be display's size minus
# overscan.
#framebuffer_width=1280
#framebuffer_height=720
# uncomment if hdmi display is not detected and composite is being output
#hdmi_force_hotplug=1
# uncomment to force a specific HDMI mode (this will force VGA)
#hdmi_group=1
#hdmi_mode=1
# uncomment to force a HDMI mode rather than DVI. This can make audio work in
# DMT (computer monitor) modes
#hdmi_drive=2
# uncomment to increase signal to HDMI, if you have interference, blanking, or
# no display
#config_hdmi_boost=4
# uncomment for composite PAL
#sdtv_mode=2
#uncomment to overclock the arm. 700 MHz is the default.
#arm_freq=800
# Uncomment some or all of these to enable the optional hardware interfaces
dtparam=i2c_arm=on
#dtparam=i2s=on
dtparam=spi=on
# Uncomment this to enable infrared communication.
#dtoverlay=gpio-ir,gpio_pin=17
#dtoverlay=gpio-ir-tx,gpio_pin=18
# Additional overlays and parameters are documented /boot/overlays/README
# Enable audio (loads snd_bcm2835)
dtparam=audio=on
# Automatically load overlays for detected cameras
camera_auto_detect=1
# Automatically load overlays for detected DSI displays
display_auto_detect=1
# Enable DRM VC4 V3D driver
dtoverlay=vc4-kms-v3d
#dtoverlay=arducam-pivariety
max_framebuffers=2
# Disable compensation for displays with overscan
disable_overscan=1
[cm4]
# Enable host mode on the 2711 built-in XHCI USB controller.
# This line should be removed if the legacy DWC2 controller is required
# (e.g. for USB device mode) or if USB support is not required.
otg_mode=1
[all]
[pi4]
# Run as fast as firmware / board allows
arm_boost=1
[all]
dtoverlay=imx519
dtparam=i2c1=on
dtoverlay=pi3-miniuart-bt
dtoverlay=miniuart-bt
core_freq=250
./install_pivariety_pkgs.sh -l
=================================================
Hardware Revision: a02082
Kernel Version: 5.15.61-v7+
OS Codename: bullseye
ARCH: armv7l
=================================================
libcamera-hello --list-cameras
Available cameras
-----------------
0 : imx519 [4656x3496] (/base/soc/i2c0mux/i2c@1/imx519@1a)
Modes: 'SRGGB10_CSI2P' : 1280x720 [120.02 fps - (1048, 1042)/2560x1440 crop]
1920x1080 [60.00 fps - (408, 674)/3840x2160 crop]
2328x1748 [30.00 fps - (0, 0)/4656x3496 crop]
3840x2160 [21.01 fps - (408, 672)/3840x2160 crop]
4656x3496 [10.00 fps - (0, 0)/4656x3496 crop]
What’s the problem?
I’m running a Telegram bot that takes photos on demand with the following command:
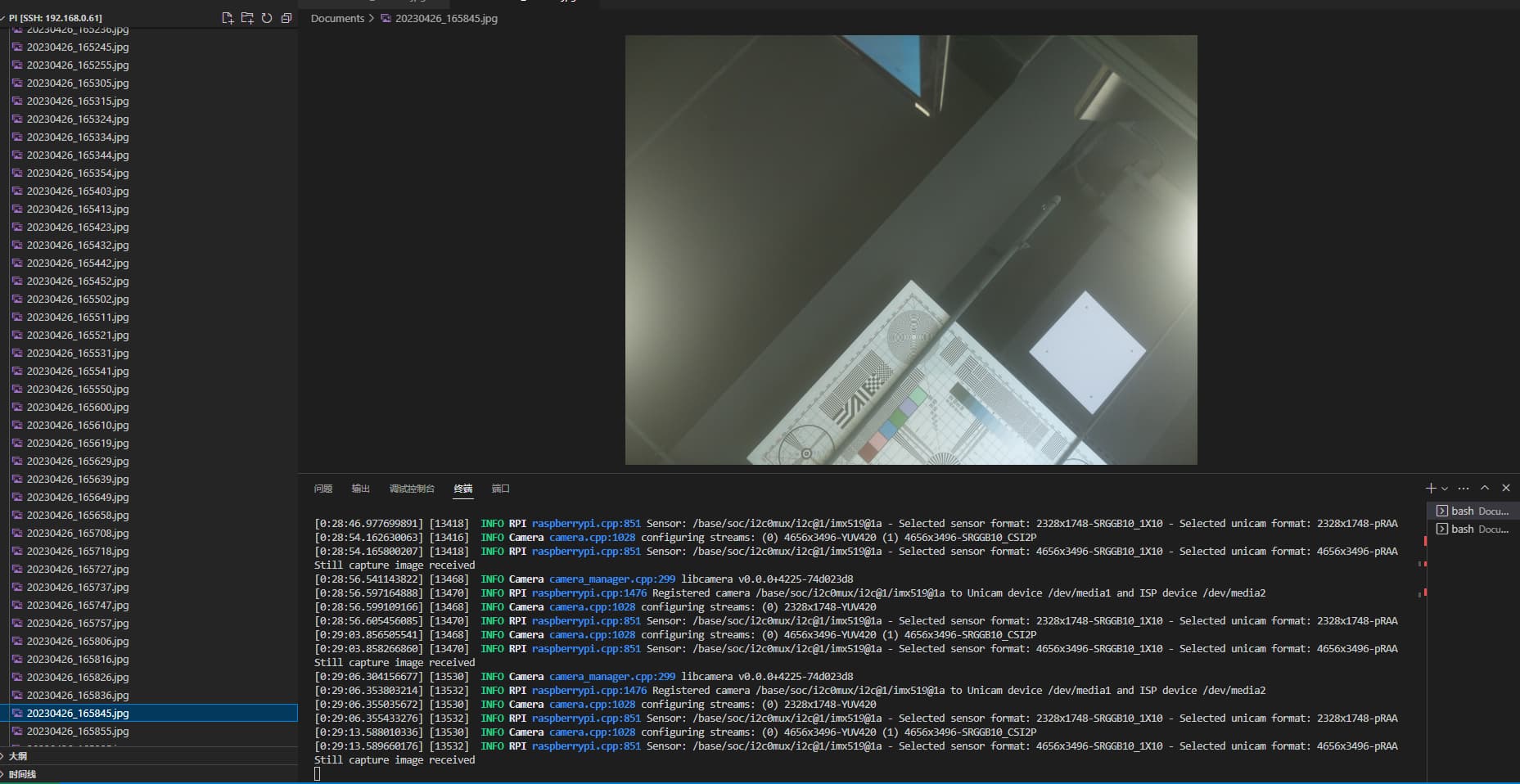
/usr/bin/libcamera-still -n --autofocus-on-capture -o test.jpg
Sometimes photos are as expected, nice; but sometimes it takes photos like the second one:


I’m trying also to perform a timelapse (2 photos per minute during 1 hour) and this is the result: timelapse - YouTube
I updated yesterday the pivariety_pkgs and reinstalled imx519_slow_driver, libcamera and libcamera_dev.
I’m afraid to move to a newer libs/kernel/distro version.
If you need further information, do not hesitate to request it.
Thanks in advance.