1.Which seller did you purchase the product(s) from?
UCTRONICS
2.The Model number of the product(s) you have purchased?
https://www.uctronics.com/arducam-synchronized-stereo-camera-bundle-kit-5mp-for-raspberry-pi-2254.html
3.Which Platform are you using the product(s) on?
Raspberry Pi 4B
4.Which instruction are you following?
stereo_depth_demo
5.Has your product ever worked properly?
Never
6.What problems are you experiencing?
Hello,
I purchased the Stereo HAT 5MP Synchronised Cameras (here) and I use it with Raspberry Pi 4B and Raspbian 32 bit.
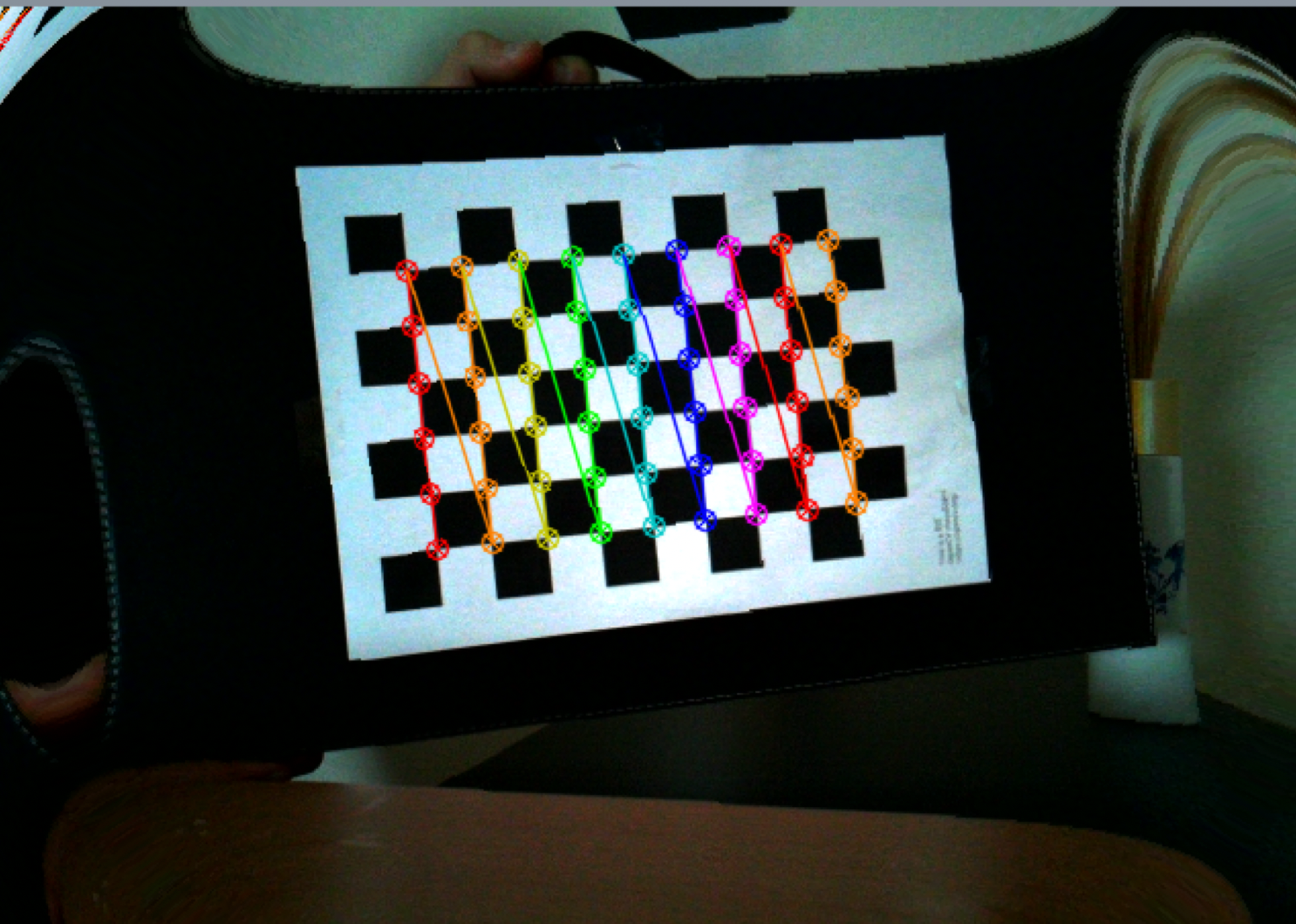
I’m doing the stereo_depth_demo and have an issue with camera calibration.
Actually, the calibration is very weird.
I tried to retake the chessboard images a few times, I always end up with something weird during rectification.
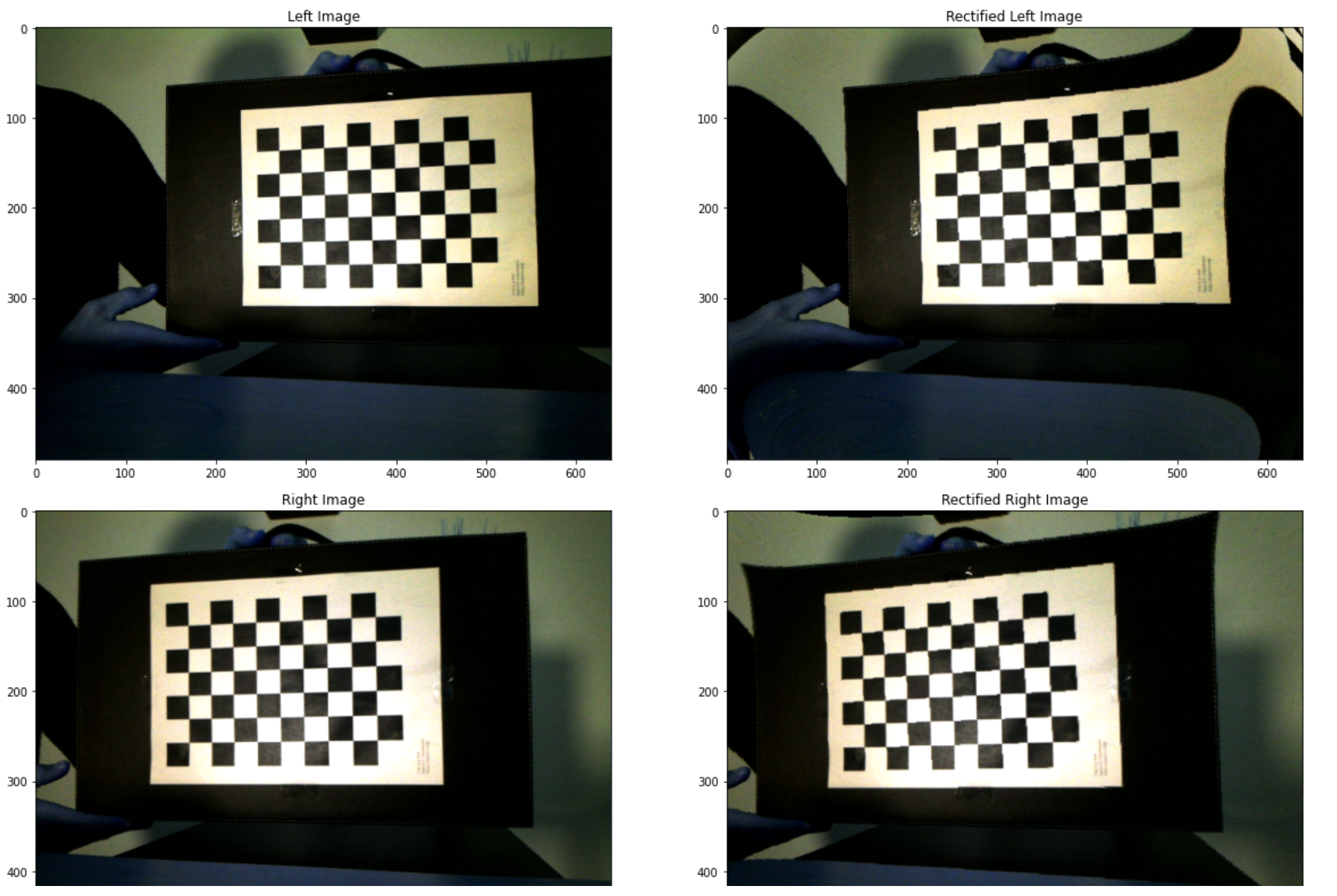
Here’s another example.
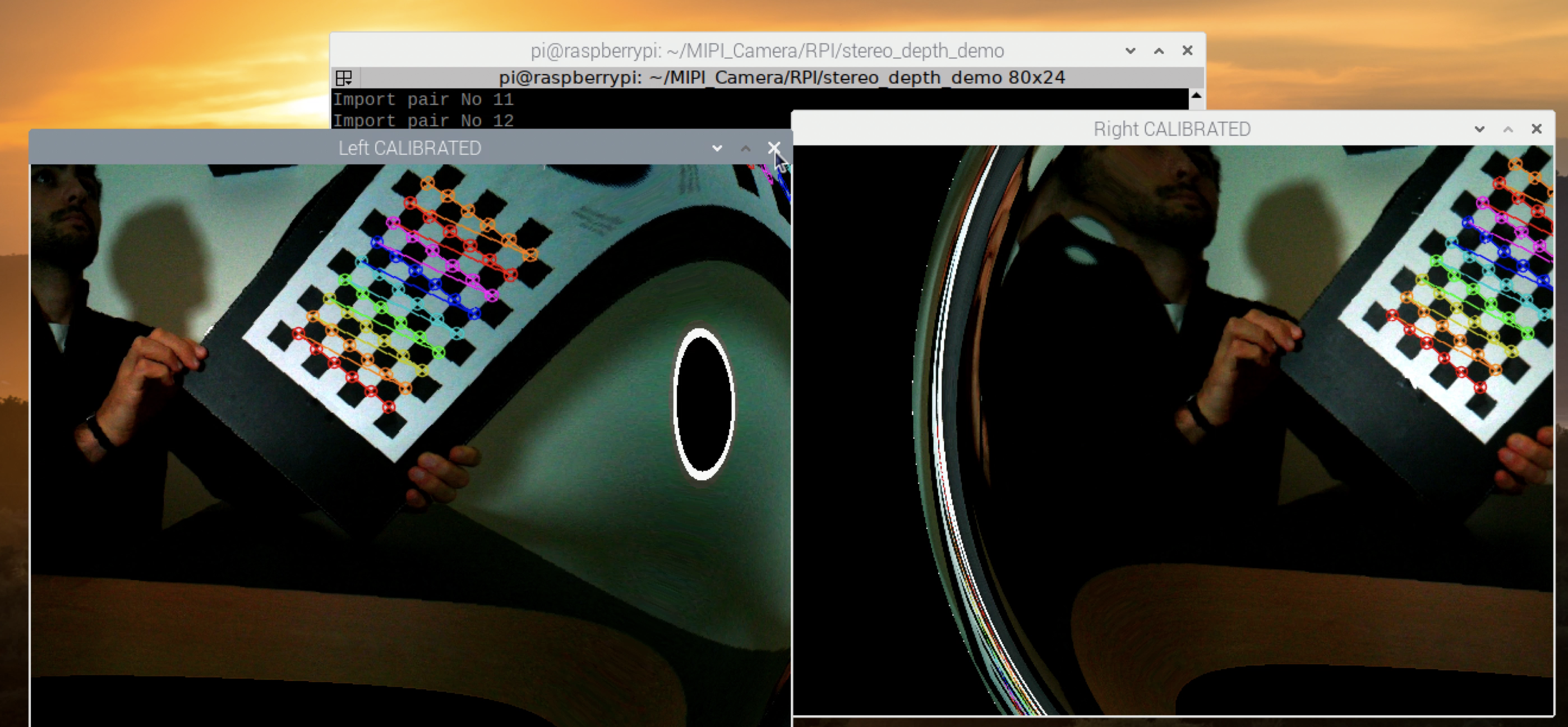
The images are worst than when uncalibrated.
Can you help me? What am I doing wrong?
Thank you,
7.What attempts at troubleshooting have you already made?
8.How would you like us to help you?