- Where did you get the camera module(s)?
- Model number of the product(s)?
IMX519
- What hardware/platform were you working on?
Raspberry Pi 4B and NVIDIA Jetson Nano B01. However, I will use NVIDIA Jetson Nano B01 for Computer Vision since Raspberry Pi 4B is very slow.
- Instructions you have followed. (link/manual/etc.)
Raspberry Pi 4B:
- Install libcamera-still based on 519操作手册说明书 (arducam.com)
NVIDIA Jetson Nano B01:
-
Install IMX519 driver based on Quick-Start-Guide - Arducam Wiki
-
Try IMX519 with this ArduCAM/Jetson_IMX519_Focus_Example (github.com)
-
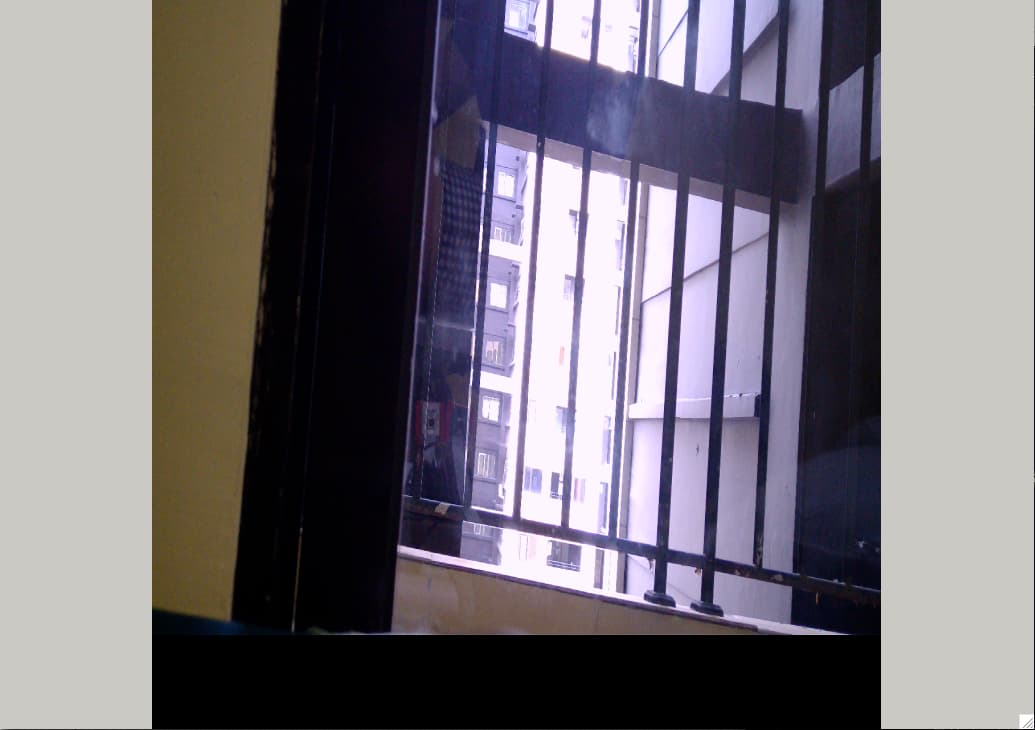
Problems you were having?
The color is different. The sensor format 2328x1724 does not exist in NVIDIA Jetson Nano B01. I can’t reproduce the frame in NVIDIA Jetson Nano B01 like in Raspberry Pi 4B libcamera-still.

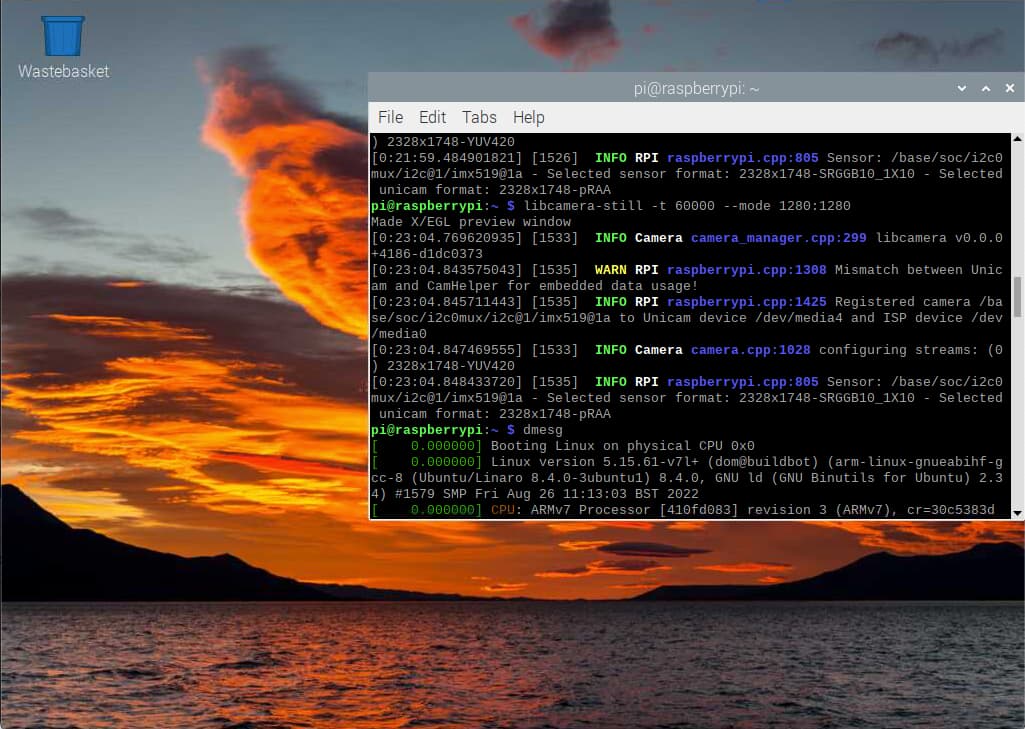
- The dmesg log from your hardware?
nvidia@nvidia:~/Arducam-IMX519$ v4l2-ctl --list-formats-ext
ioctl: VIDIOC_ENUM_FMT
Index : 0
Type : Video Capture
Pixel Format: 'RG10'
Name : 10-bit Bayer RGRG/GBGB
Size: Discrete 4656x3496
Interval: Discrete 0.100s (10.000 fps)
Size: Discrete 3840x2160
Interval: Discrete 0.048s (21.000 fps)
Size: Discrete 1920x1080
Interval: Discrete 0.017s (60.000 fps)
Size: Discrete 1280x720
Interval: Discrete 0.008s (120.000 fps)
- Troubleshooting attempts you’ve made?
I tried to use gstreamer pipeline to resize the image from 3840x2160 to 1280x1280. But the bottom part of the frame become black.
def gstreamer_pipeline(
# Issue: the sensor format used by Raspberry Pi 4B and NVIDIA Jetson Nano B01 are different
# in Raspberry Pi 4B, this command
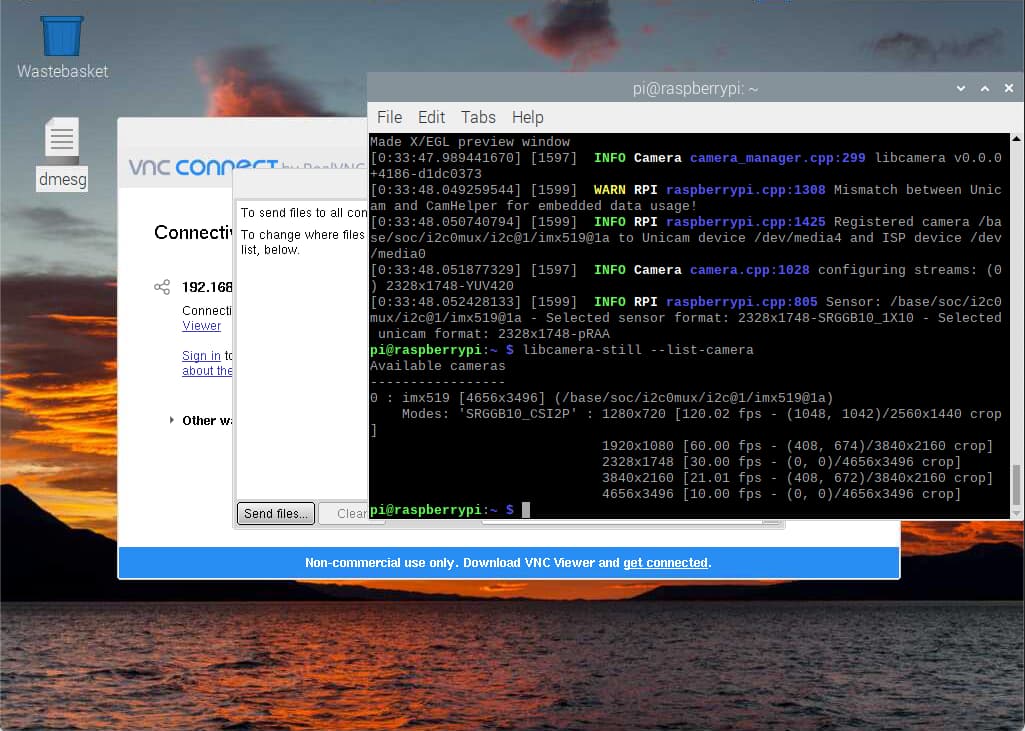
# $ libcamera-still --width 1280 --height 1280 --mode 1280:1280
# uses sensor format 2328x1748.
# However, v4l2-ctl --list-formats-ext do not have such format.
sensor_id=0,
capture_width=3840,
capture_height=2160,
display_width=640,
display_height=360,
framerate=21,
flip_method=0,
):
return (
"nvarguscamerasrc sensor-id=%d ! "
"video/x-raw(memory:NVMM),width=(int)%d,height=(int)%d,format=(string)NV12,framerate=(fraction)%d/1 ! "
"nvvidconv flip-method=%d ! "
"video/x-raw,width=(int)%d,height=(int)%d,format=(string)BGRx ! "
"videoconvert ! "
"video/x-raw,format=(string)BGR ! "
"appsink"
% (
sensor_id,
capture_width,
capture_height,
framerate,
flip_method,
# capture_width/2 - display_width/2,
# capture_width/2 + display_width/2,
# capture_height/2 - display_height/2,
# capture_height/2 + display_height/2,
display_width,
display_height
)
)
- What help do you need?
I need to make the frame from NVIDIA Jetson Nano B01 identical to frame from Raspberry Pi 4B.