I think this is probably the best place to post this, but please let me know if I should move it to another forum topic:
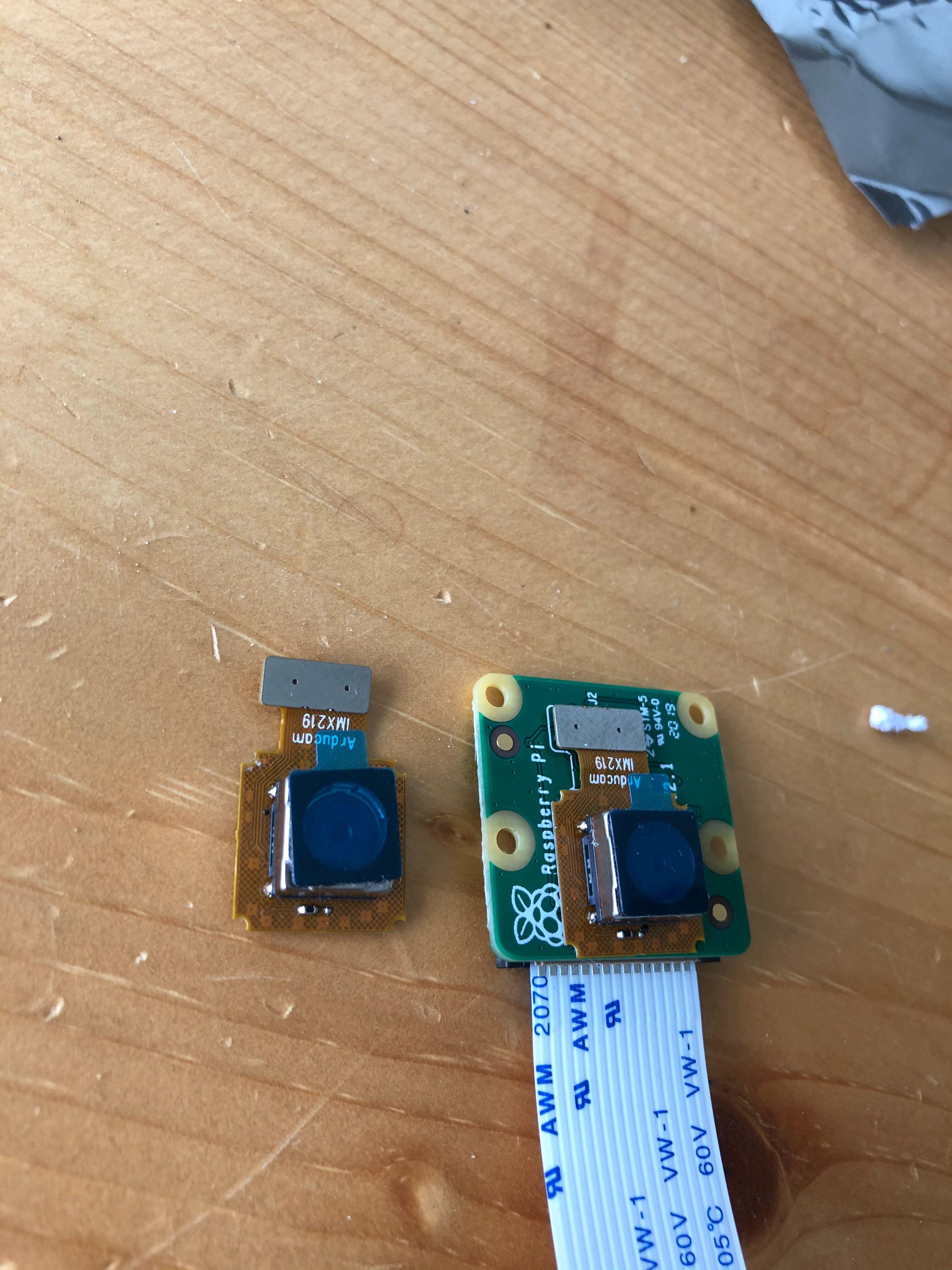
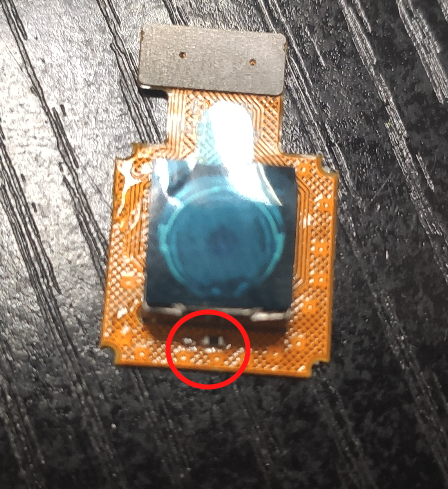
I am trying to get the arducam autofocus (AF) camera module to work with the Nvidia Xavier developer board. I have 2x B0182 arducam Raspberry Pi V2 8mp motorized focus drop in camera replacements. I am using these cameras along with the Leopard imaging LI-JXAV-MIPI-ADPT-4CAM which breaks out 4 csi connectors on the Nvidia Xavier. I can access the AF cameras just fine, capture and stream video via commands using “argus_camera” or “gst-launch-1.0 nvarguscamerasrc” on the xavier but the focus motors don’t show up anywhere on any of the i2c-busses. Note that the motors don’t show up for either of the camera modules I have (either both motors are broken or the B0182 doesn’t work with the Xavier/Leopard imaging combo).
I also tried getting these to work on a Raspberry Pi B3 with no success, but after reading the product page a little more carefully, I don’t think this version (B0182) is meant to work with the Pi B3/3+: “Note: The camera can be used on compute module CM3, CM3+, and NOT compatible with Raspberry Pi 3B/B+”
As the Xavier i2c bus configuration is slightly different than the Jetson Nano’s, I ran an i2cdetect command on each of the i2c busses I can see to try to hunt down where the motors turn up. This returned the addresses below, which I don’t think contains the motor addresses anywhere (UU are the reserved addresses on each bus). Busses 3, 5 and 6 took too long to scan and are assumed to be used internally/blocked. Bus 30-33 are expansions provided by the Leopard Imaging board - you can see the RPi camera V2 encryption chip address, 0x64, show up on bus 30 where the AF camera is connected. So I would expect to see 0x0c show up on bus 30 for the AF motor control as well.
Bus 0: 0x50 0x56
Bus 1: 0x74, UU: 0x08, 0x40, 0x41
Bus 2: 0x54, UU: 0x10, 0x70
Bus 4: 0x20, 0x40, 0x50 UU: 0x3C, 0x4C, 0x68
Bus 7: UU: 0x1A
Bus 8: 0x74 (40-pin header bus)
Bus 30: 0x54 0x64, UU: 0x10, 0x70
Bus 31: 0x54, UU: 0x10, 0x70
Bus 32: 0x54, UU: 0x10, 0x70
Bus 33: 0x54, UU: 0x10, 0x70
Any insight on if the B0182 should work on the Nano (which I’d then expect to work on the Xavier as well) or if I just happened to get 2 faulty motor modules would be much appreciated. Similarly any help debugged would also be appreciated.