Hi, im sorry this still isn’t very useful. I really really really would just like to be able to take high resolution photos with this camera setup i purchased from you all, and it’s incredibly disappointing that I can not do the basic things.
If we can get ANY KIND of basic workthrough that results in a person with a fresh Pi4 being able to take 64mp Autofocus images, i will be thrilled, and I will share and document the exact process. But right now, I am not sure if this exists. And pointing to a couple of half-completed walkthroughs and then basically saying “then read the entire forum for troubleshooting” isn’t great 
Here I will guide you through exactly what I did from a fresh image based on the links you just sent here and show you how it is not adequate for your customers (even advanced customers, doing all sorts of hacking to get it working!)
A) Install
So first Installed the latest Raspberry Pi OS 32Bit
it’s a headless configuration set at 1024x768
Please note that to make the cameras work though i have to go into raspi-config and
Choose “Enable Legacy Camera”
There is a problem though that when you do this, for some reason Raspberry pi won’t display a headless image.
So then one must
edit config.txt with sudo nano /boot/config.txt
and choose
hdmi_force_hotplug=1
B) Arducam Quickstart guide
next, i follow the quickstart guide you sent
https://docs.arducam.com/Raspberry-Pi-Camera/Native-camera/Quick-Start-Guide/
Hey this was quick and simple, and by the second to last step
libcamera-still -t 5000
That totally works and i can preview the image
If i run the next command though and actually try to save an image, it totally crashes
libcamera-still -t 5000 -n -o test.jpg
(Crashes )
…skipping ahead after a long time messing with this, i had to find that i still needed to set
dtoverlay=vc4-kms-v3d,cma-512
so that after running cat /proc/meminfo
my
CmaTotal: 524288 kB
in order to save a photo. (This should be a step in the "Quick Start guide if you want people to actually be able to run the commands you say)
so now I can run
libcamera-still -t 5000 -n -o test.jpg
and i get a file!
unfortunately it is not a full 64mp, but that’s ok, because i can learn independently how to set the libcamera myself
libcamera-still -t 5000 -n -o test.jpg --width 9152 --height 6944
and voila! I have a 64mp photo!
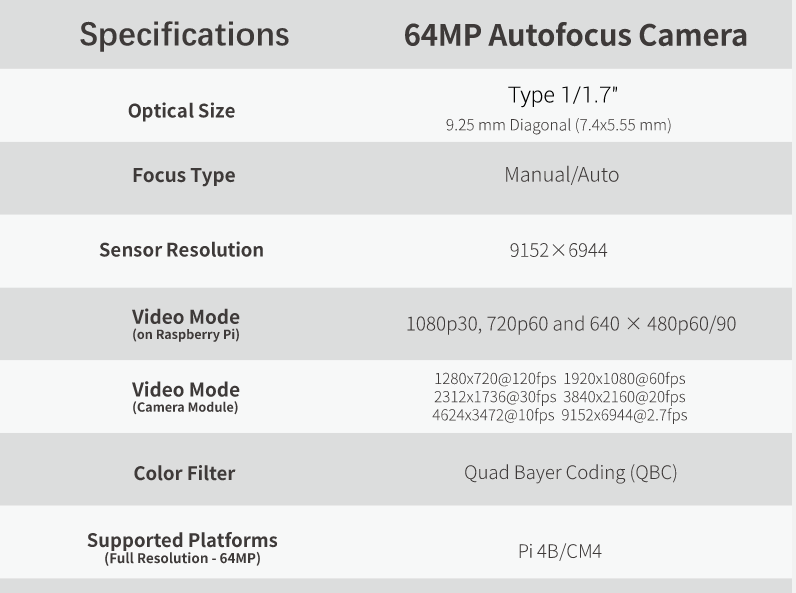
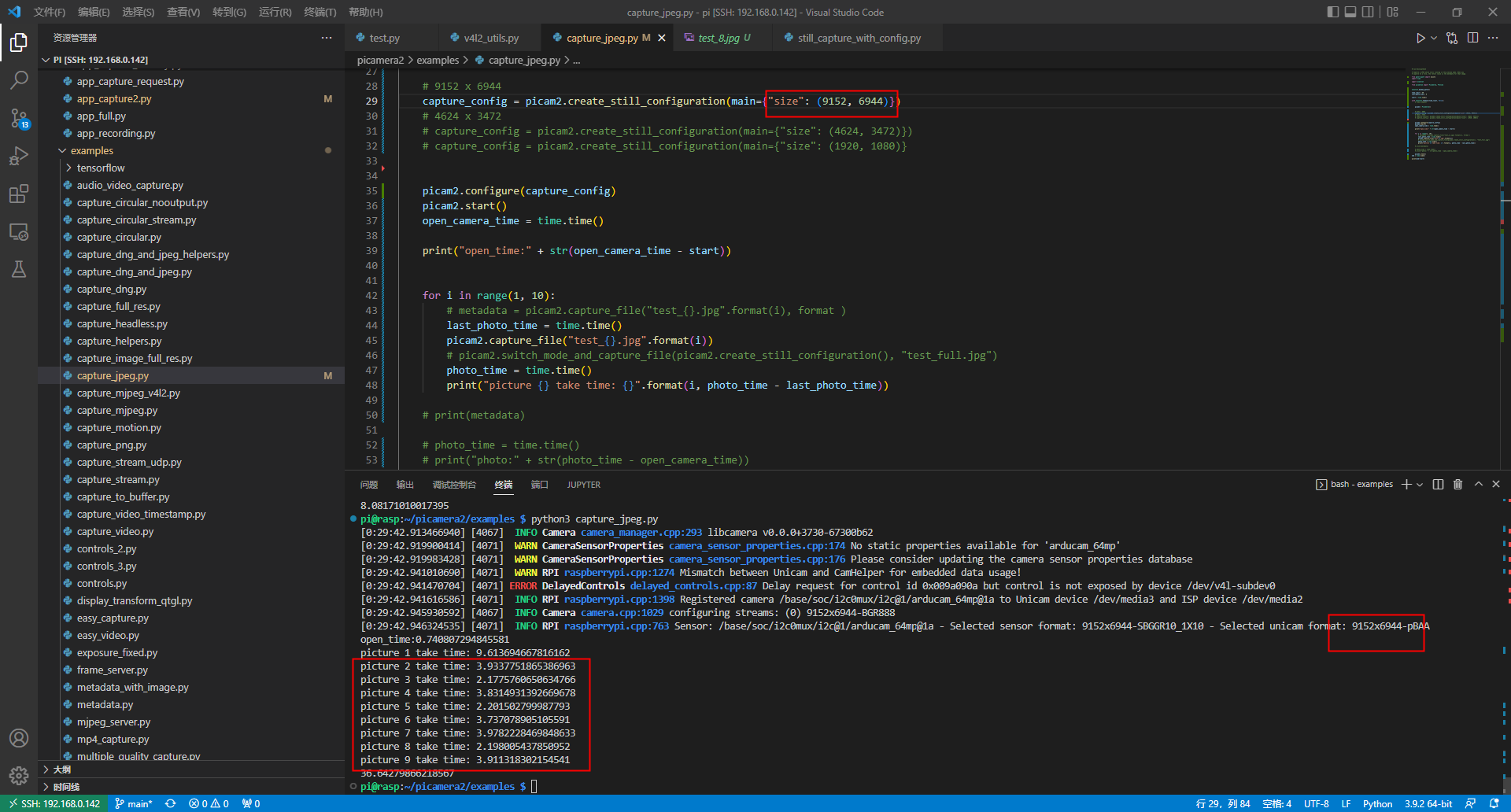
Now this photo takes a full 16 seconds to actually take (even after i remove the -t 5000)! (which is wayyyyyyyyyy below the performance you all list when people purchase this camera that says the camera can do 2.7 fps at 64mp which feels pretty misleading, but hey at least we got a photo!)
Cool, so we are halfway there, if i can now autofocus the camera and then take a photo I will be as happy as a clam!
C) Picamera2 and autofocusing
So i follow the next link
Picamera2 - Arducam Wiki
and run all the commands to get picamera2 working on the machine
but when i run the example
i get a preview window showing the cameras, but no focusing because an error pops up:
raise RuntimeError(f"Control {name} is not advertised by libcamera")
RuntimeError: Control AfMode is not advertised by libcamera
i also then try to run some libcamera commands from the command line like in this link you all have
https://docs.arducam.com/Raspberry-Pi-Camera/Native-camera/Libcamera-User-Guide/#for-arducam-16mp64mp-autofocus-camera
all of those commands run and don’t throw any errors, but also the focus never changes and I always get an error list that gives lots of i2c errors and such.
glowcake@glowcake:~ $ libcamera-still -t 0
Made X/EGL preview window
[0:06:26.217361021] [1415] INFO Camera camera_manager.cpp:299 libcamera v0.0.0+4186-d1dc0373
[0:06:26.221403401] [1417] WARN CameraSensorProperties camera_sensor_properties.cpp:205 No static properties available for 'arducam_64mp'
[0:06:26.221529438] [1417] WARN CameraSensorProperties camera_sensor_properties.cpp:207 Please consider updating the camera sensor properties database
[0:06:26.221683605] [1417] ERROR V4L2 v4l2_device.cpp:92 'dw9807 10-000c': Failed to open V4L2 device '/dev/v4l-subdev1': Invalid argument
[0:06:26.221765438] [1417] ERROR CameraSensor camera_sensor.cpp:501 'arducam_64mp 10-001a': Lens initialisation failed, lens disabled
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
Ioctl read i2c error:: Remote I/O error
And so that’s where I am at. I can take photos, but i cannot change the focus at all